硬件在环(HIL)仿真方案
本文共 236 字,大约阅读时间需要 1 分钟。
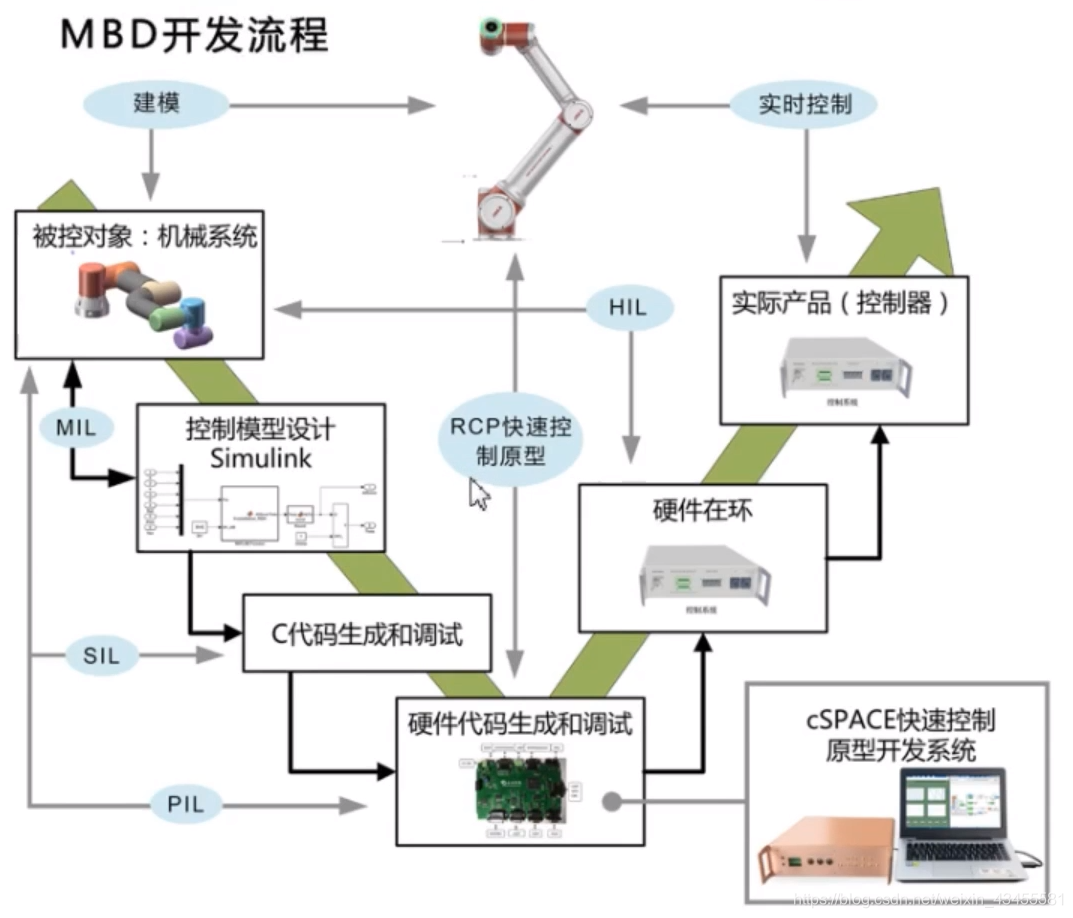
- 方案1:仿真模型在simulink中搭建,通过TCP或ROS等实现与实际控制器的通信,从而实现HIL仿真
- 方案2:仿真利用各种成熟的动力学仿真软件,通过一定的通信手段实现与实际控制器的通信
这种联合仿真中,要注意仿真时间的同步问题!
不同的方案原理相通,与我们平常仿真实际没什么不同,只不过控制器拿到了仿真环境外,主要目的是验证我们的嵌入式系统的可靠性!能够让我们更有效的测试嵌入式控制系统,避免了由于逻辑错误导致的设备损坏,也保证了人员安全,利于产品完善和研发成本压缩~
转载地址:http://yyzxf.baihongyu.com/
你可能感兴趣的文章
什么是SCGI
查看>>
python写的本地搜索小工具0.9
查看>>
远程访问和文件传输介绍
查看>>
vi 突然显示空格的颜色
查看>>
利用linux处理网络流量数据
查看>>
putty的复制和粘贴
查看>>
tar 由于前面延迟的错误而退出
查看>>
linux subversion 的几个命令
查看>>
[转]通过RSS订阅、邮件转发自动同步多个Blog
查看>>
数字证书
查看>>
vim 与vi的兼容性问题
查看>>
用vim编python程序
查看>>
【转】Winxp下 gvim 编程环境搭建
查看>>
用python3.0 和vim配合检查文件中文的编码
查看>>
开机自动打开windows共享
查看>>
163提供开源操作系统的镜像
查看>>
sqlserver 2008 服务没法启动
查看>>
用rkhunter检查系统安全性
查看>>
ssh 连接很慢的解决办法
查看>>
Python:过滤元素的迭代函数filter()
查看>>